About Prism's mapping data
To determine which vehicle activity occurs on and off public roads, Prism compares each GPS position recorded by your telematics devices to a data set we maintain that represents national public roads and other land features relevant to this purpose.
In constructing and maintaining this data set, we aim to achieve the following:
Maximum accuracy with regards to road positions, shape and area
Maximum currency (as up to date as possible)
Prevent inadvertent non-public road classification of a position in cases of doubt
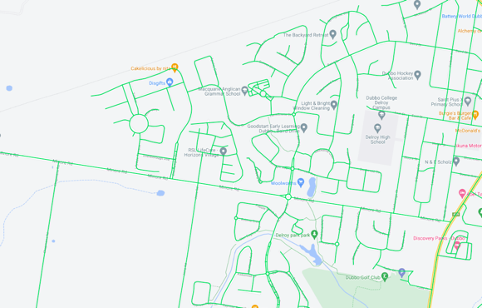
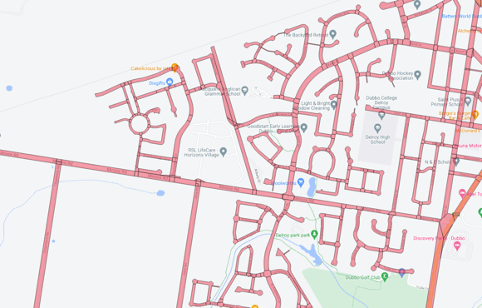
Source inputs, which may be provided as road centrelines, polygons or other objects, are converted to polygons by applying a buffering process with widths specified based on the road type.
A quality and control process is applied to each data build and the Nuonic team, and its clients, regularly review processing results against the data to identify any areas of inaccuracy or required adjustment.
The entire data comprises over 4 million polygons. Due to the size of the data and the ever-evolving road infrastructure environment, keeping this data current is a continuous task for the Nuonic team.
We welcome any feedback with regards to data quality, sources, evaluation processes and potential updates.
Data sources
There is no single, comprehensive source of spatial data for public roads within Australia, in the form of polygons that can be used in spatial comparison operations to points, that is available for this purpose, so our mapping data combines inputs from numerous public and private sources including:
Australian State and Federal Transport, Infrastructure and Resources agencies
The Australian Bureau of Statistics
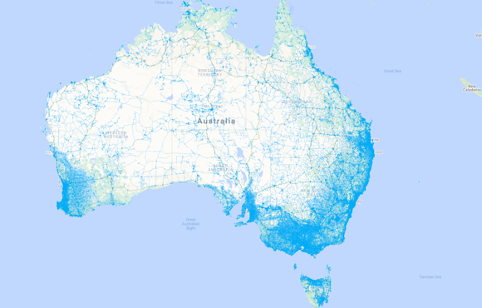
OpenStreetMap
Google Maps
Mapbox
Client, partner and internal analysis
Each of these data sets provides an input component, some focussed on a specific region and some national and each data set has it’s own frequency of update ranging from annual to daily.
Below is an image of the public road network represented by OpenStreetMap.
Type Conversions and Road Widths
Most inputs provide only part of the information required to construct a comprehensive map for large scale GPS position comparisons. The following factors are addressed in our map build process:
Converting data provided as Line objects (which have no width and therefore cannot ‘contain’ a GPS position) to Polygons objects.
Adjustment of Coordinate Reference Systems to Australian-localised standards.
Filtering objects based on descriptive criteria related to road use or ownership.
Standardising categorisation of road type.
Application of width